【自作ドローンの製作Ⅱ】第3回:機体のスペック紹介

はじめに
第2回ではモチベーションの関係からドローン製作を中止するお知らせを出しました。
しかし、フレームのアイデアを思いついたことによってモチベーションを取り戻し、なんとかハードウェア製作を完了しました。
よって、第3回はハードウェアについてのまとめになります。
製作したドローン
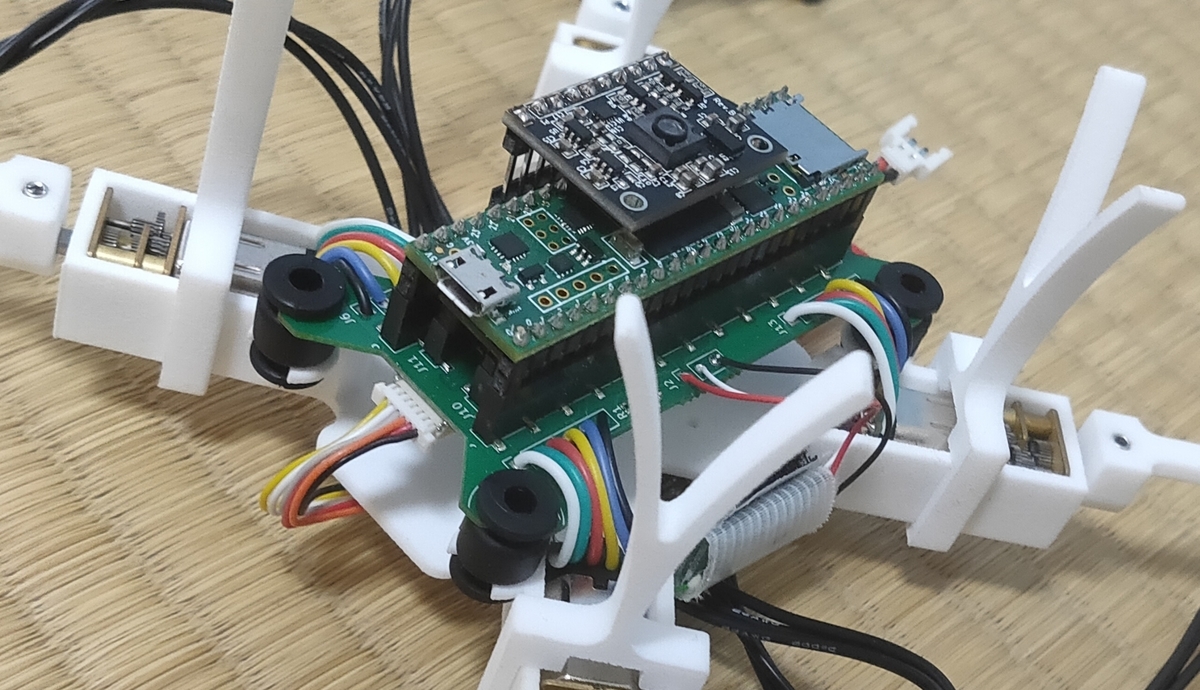
今回製作した自作ドローンを以下に示します。特徴としてロッドの部分にサーボモータを取り付けて推力方向を変える機構を搭載しています。

サーボを動かした時の動画が以下になります。なんでこんな機能を搭載したかについては第1回を見てください。
機体スペック
| サイズ | 260×260×75mm |
| 重量 | 205g |
| マイコン | Teensy4.1 |
| サーボモータ | 150:1 シャフト付き超小型メタルギアドモーター HPCB 6V |
| サーボモータエンコーダ | シャフト付き超小型メタルギアドモーター用磁気式エンコーダ |
| サーボモータドライバ | デュアルモータードライバDRV8835 |
| ESC | RCX BS-15A Pro 4-In-1 BLHeli_S ESC |
| 姿勢センサ | BMI088自作モジュール |
| 位置センサ | VL53L0x/PMW3901搭載 ToF測距/オプティカルフローセンサモジュール |
| プロペラ | 3x2.5" T-Type 3025 Multirotor Propeller |
| モータ | RCX NK1108 6000KV FPV Racing Motor for Mini/Micro Drone |
| バッテリー | 950mAh 25C 7.4V バッテリー (New V120D02S 2セルヴァージョン用) |
| 受信機 | R3206SBM |
| フレーム | 3Dプリンタ(ナイロン素材) |
本当は200g以下に抑えたかったけどわずかにオーバーしてしまいました。プロペラガード外せば多分200g以下だと思います。
ナイロン素材が思ってたより柔らかくてフレームがたわむので、飛行に影響でないか心配です。あと白いナイロンは汚れが目立ちます。
その他外観
裏から見た図。配線もスッキリしているので個人的に満足。

斜めから見た図。今回もダンパつけてます。効果があるかはわからないけど市販ドローンには大体ついてるので真似してる。バッテリーはフライトコントローラの下に収まります。
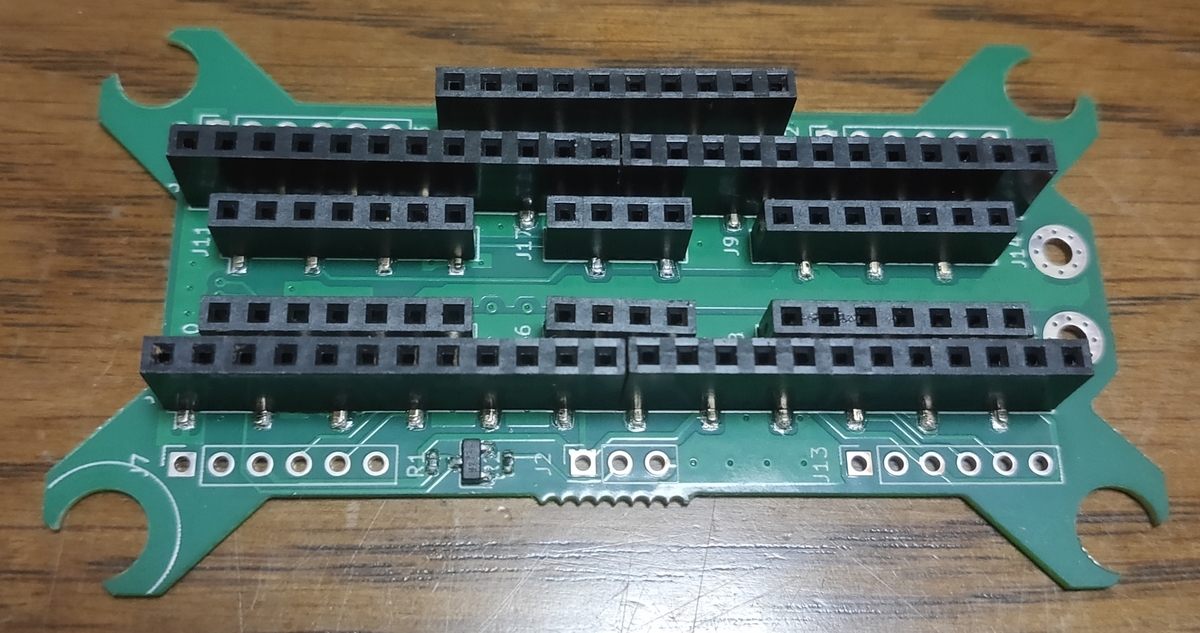
フライトコントローラ基板
今回のドローン用に以下の基板を作成しました。これがフライトコントローラとして機能します。
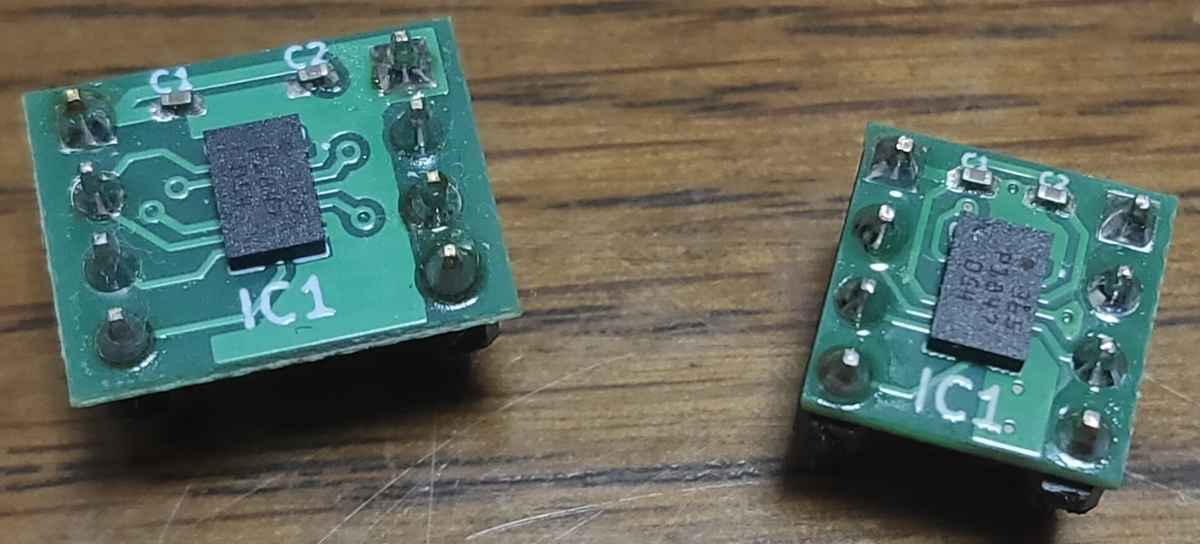
まず、真ん中にBMI088とDRV8835が載っかります。
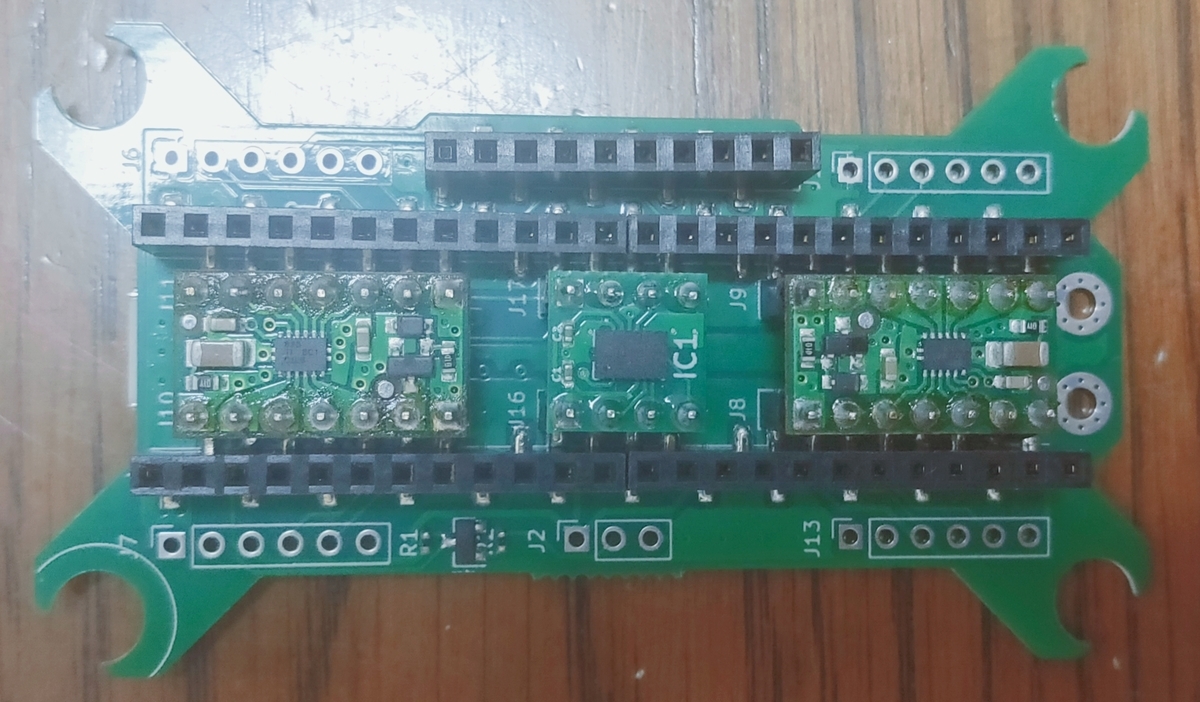
BMI088は自作モジュールで下記で作成したモジュールを回路そのままで更に小型化したものです。
その上にTeensy4.1が載っかります。
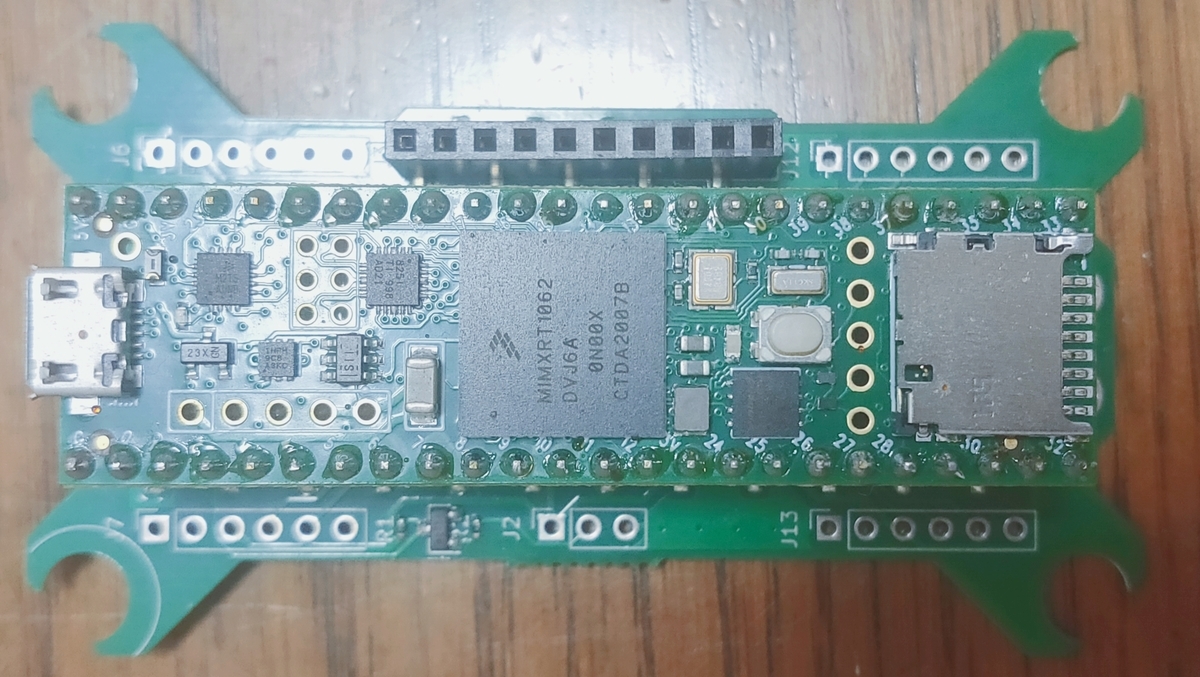
最後にオプティカルフローセンサモジュールが載っかります。全部モジュール部品なのでどこか壊れても交換しやすいようにというのがコンセプトです。

回路図
今回は回路図もモジュール化して再利用性を高めようとしましたが、まぁ分離するほどの回路ではなかったですね...。
パターン図
設計している時はこの配置で行けると思っていましたが、実際に実装してみると部品密度高すぎて辛かった...

おわりに
今回は自作ドローン2号機のハードウェアについてまとめました。
今はソフトウェアの作成を頑張っています。次回は飛行している姿を見せたいですね。
なんとか飛びました↓↓↓